Technology
We separated the Morse Decoder into three distinct parts. The first part decodes the signal into a series of DITs, DAHs, GAPs, and SPACEs. The second part takes those and outputs the letters as well as a done flag. The last part implements the former parts on the FPGA.
High Level Schematic
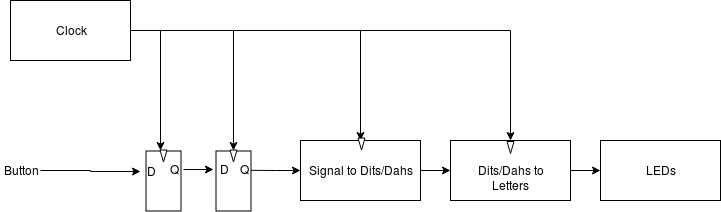 Note that the schematic for the FPGA implementation is slightly different for there is another button input for the user to manually control the
Note that the schematic for the FPGA implementation is slightly different for there is another button input for the user to manually control the done signal
Decoding the Signal Into DITs, DAHs, GAPs and SPACEs
Describing DitDahDecoder.v
To implement the signal decoder, we made a counter that starts counting up as long as the signal is constant, whether high or low. The counter increments by one for each clock cycle. When the signal switches, the counter is reset to 0. This counter serves as a debouncer of the button as well as timing for the DITs, DAHs, GAPs and SPACEs due to the fact that the counter only accumulates when the signal is constant at 1 or 0. The following table details what constitutes a DIT DAH, GAP and SPACE:
| Output | Time Length (Relative) | Held Signal | MSBs |
|---|---|---|---|
| DIT | 1 | 1 | 001 |
| DAH | 3 | 1 | 011 |
| GAP | 3 | 0 | 011 |
| SPACE | 7 | 0 | 111 |
DITs and DAHs are activated when the signal goes from on to off, depending on the value of the counter. If the three most significant bits (MSB) are 001, a DIT is output for one clock cycle. if the three most significant bits are 011, a DAH is output for one clock cycle. Because a SPACE is technically needed for separating the letters, GAP needs to be an output in addition to a SPACE being an output. So GAP is output as soon as the most significant bits are 011, and all other bits are 0, so that it only reads out for one clock cycle. A SPACE is output when the signal goes from off to on, and the most significant bits are 111. If none of the conditions are met, it outputs a WAIT state indicating nothing to be done. Checking the three most significant bits gives the user a window of one time length (same as the length of a DIT), as users are not perfect. For our implementation on the FPGA, the clock is running at 125MHz, and we decided upon 30 bits for the counter, which causes one relative time length (shown in the above table) to be about one second.
Translating DITs, DAHs, GAPs and SPACEs Into Letters
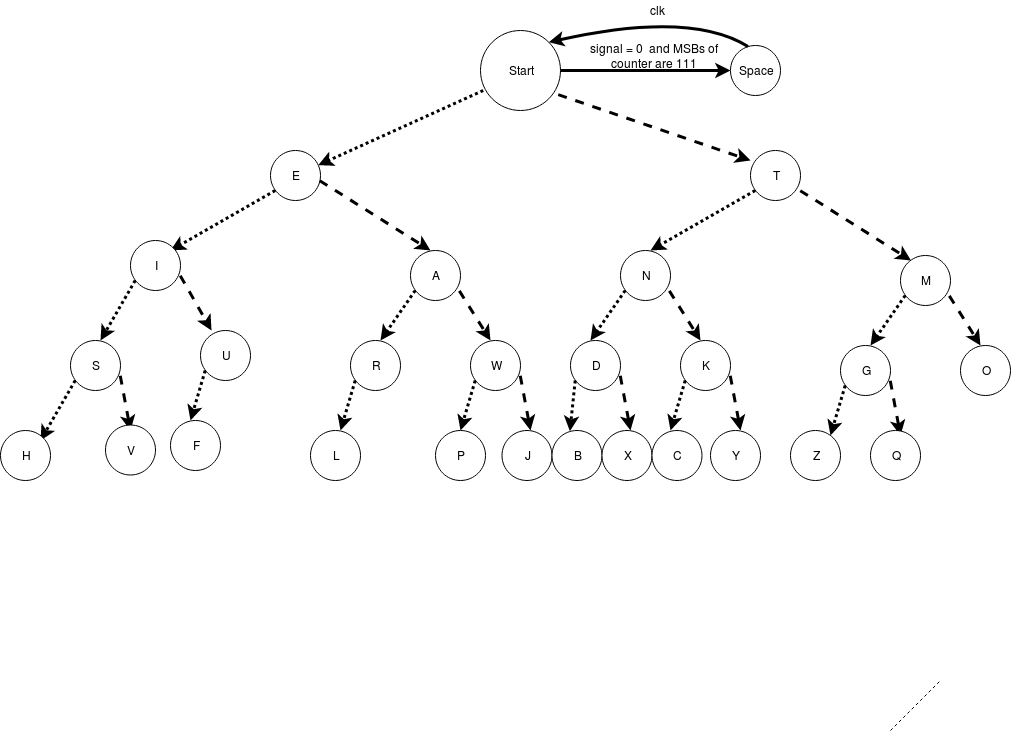
Alphabet FSM takes in the DITs, DAHs, SPACEs, and GAPs produced by the module in DitDahDecoder.v and translates a series of these signals to letters for the system to output. This finite state machine is in the alphabetMachine.v file in the project repository. Each state represents a letter, and each transition is dependent on the current state (letter) and the input signal.
A slightly simplified version of the implemented finite state machine is shown above is shown above. Each dashed line represents a DAH causing a state transition, and each dotted line represents a DIT causing a state transition. Note that there is implicitly an arrow from each state to itself (with the exception of the SPACE state) which is used to transition in the case of a WAIT signal. Each letter state also has a transition to the start state which is triggered by a GAP signal.
Wrapper for FPGA
The FPGA implementation of the Vivado simulation required a wrapper to synthesize on the FPGA we used for the project (the Zybo Zynq-7000). Once the Vivado implementation was completed, we wrote morse_wrapper.v to include the MorseDecoder.v file that managed the signals and states in combination with a register module file register.v. The wrapper file consists of a singular module that takes the clock and button presses as inputs, and outputs various information on the board LEDs, as well as a peripheral module that has an 8-LED package. The inputs and outputs of the MorseDecoder module were wired up, and the input signal was assigned to a button on the FPGA. After this signal was received on the hardware, we ran it through two D-flip-flops to synchronize it with the clock, and then passed it as an input to the MorseDecoder module. The outputs of this module, done and letter, were assigned to various LEDs on the FPGA and peripheral board, listed below in the hardware output guide.
Hardware I/O Guide
| Hardware | Information Displayed |
|---|---|
| Button 0 | User Input |
| Button 1 | Done Signal |
| LED 0 | MSB of Counter |
| LED 1 | 3rd MSB of Counter |
| LED 2 | Done Flag |
| LED 2 | Output Synchronizer |
| PMOD LED 0-7 | ASCII Code of Letter |
Difficulties
- The initial DIT DAH decoder used a state machine, but that implementation was too constraining for the user it input the Morse Code.
- We had difficulty deciding the best method to notifying when the letter was ready to output. This included sending a done signal, only outputting the letter when it was ready, and outputting the letter for one clock cycle. We settled upon sending a done signal, which may be a cause to our difficulty with the FPGA (see last bullet point).
- On the FPGA side, it was difficult thinking about when exactly to change the LEDs. We ended up with changing the LEDs on a positive clock edge when the done flag is up.
- At one point, the DIT DAH decoder was changing both at a positive edge of a clock, and the positive edge of the input signal. This caused errors once we moved to the FPGA. To fix, we put all logic inside a single always @ positive clock edge, and dealt with other things with if statements.
- While our overall decoder worked perfectly in simulation, the implementation on the FPGA did not at first. It would set the letter to 0s whenever the state went to start, and we still don’t know why this occurs, as nowhere in our code do we set letter to 0. As a result we had the user manually input the done signal through button 1 after they were done sending a letter over. After this, it would then display on the LEDs on the PMOD attachment.